3 Axis Robot Arm Mrk1










Print Profile(1)

Description
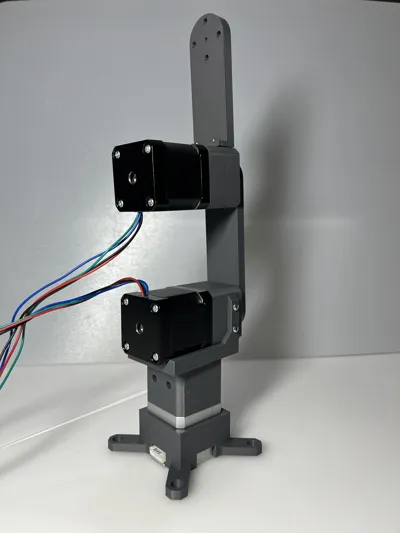
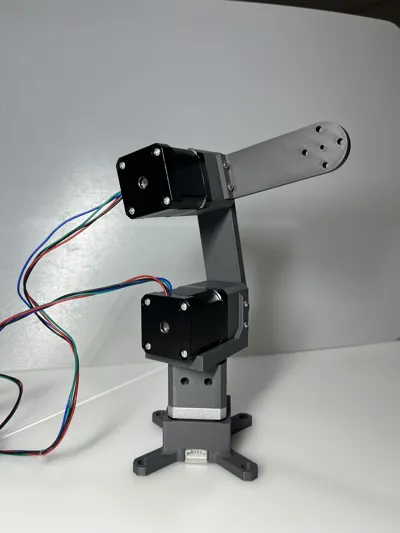
3 Axis Robot Arm – First Version
This is the very first version of my 3-axis robotic arm project.
For this build, I decided to reuse my older gear reducers, which you can also find on my profile. They have proven to be reliable and efficient, making them a great starting point for this design. This arm is mainly intended as a test platform for exploring movement control, mechanical stability, and modularity.
Future versions will be coming, with improved mechanics, enhanced precision, and potentially additional axes or attachments to expand its capabilities. Each new iteration will build on the lessons learned from this first prototype.
Technical details:
- Powered by NEMA 17 stepper motors for smooth and precise motion
- Requires M3 screws, M3 nuts, and M3 heat-set inserts for assembly
- Designed with reusability in mind — compatible with my previously shared gear reducers
- Easy to print and assemble with standard tools
This first version is perfect if you want a functional base to experiment with or to customize for your own projects. Stay tuned for more upgrades and design improvements!
License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (18)