Search models, users, collections, and posts
Forklift Tuning for Cyberbrick Forklift
IP Report











GIF




Print Profile(1)

0.2mm layer, 2 walls, 15% infill
Designer
1.4 h
1 plate
Open in Bambu Studio
Boost
147
367
8
6
273
18
Released
Description
Content has been automatically translated.
This new bottom part for the CyberBrick forklift enables 3 new features
1: Driving, as before with chains, only more precise
2: Driving with 4 wheels with all-wheel drive. The model is surprisingly agile
3: Driving with Mecanum wheels. The model is just as agile, but can also drive to the right or left
The CyberBrick forklift is great and fast. Unfortunately, when stacking, I always had the problem that I often moved the shelf because stacking felt more like parking a car in a tight parking spot in 3rd gear: that works somehow, but I didn't really enjoy it
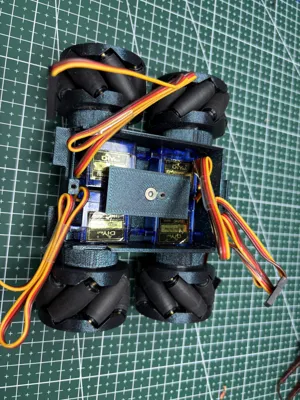
So the forklift had to be slowed down ("tuned"). I therefore built a version with 4 servos (see picture), which unfortunately wasn't significantly slower either
If the speed was electronically limited, the control became imprecise due to tolerances in the motors. A tachometer didn't help much either
I therefore had the idea to use N20 motors. Bambulab does have N20 motors in its program, but unfortunately, they are not slower than the original motor
The small shop with the big “A” offers N20 motors with 42 rpm in a 4-pack at a very reasonable price, and the motor mount is also included: So let's get them (Caution: The wheels are only clamped. Therefore, you have to be very careful when pulling them off, otherwise the delicate motor is history)
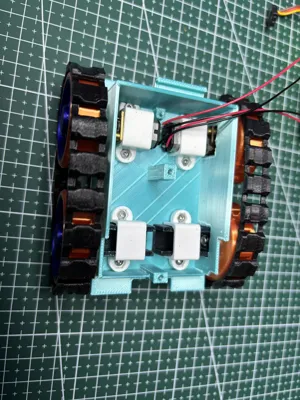
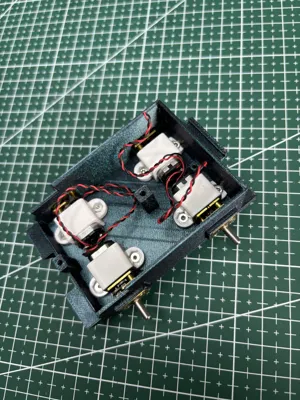
Therefore, I designed a new bottom part for the forklift, into which either 4 N20 motors or 2 motors and 2 dummies can be installed. With this version (2 motors and 2 dummies and the obligatory chain), the forklift works slower, but significantly more precise and better
Since I already had 4 motors, I built an all-wheel drive version with the CyberBrick wheels. The motors on the left and right axles are connected in parallel. This version also runs perfectly
Next, I printed the Mini Mecanum wheels from DDWMAKER
Since the CyberBrick receiver can only control 2 motors but 4 servos, I removed the circuit boards from the 360-degree servos used above and controlled the 4 motors as servos
Since I no longer had an output for the fork's servo, I simply connected the board-less servo as a motor (works great)
I printed the rollers for the Mecanum wheels with eSUN TPU95A. However, the surface was so smooth that the rollers did not have enough grip with the small contact area. Therefore, I pulled heat shrink tubing over the rollers. With that, the forklift ran perfectly. Meanwhile, I printed the rollers with the new Varioshore TPU from Colourfabb at 215 degrees. They run even better with this, but the difference to the heat shrink tubing is not very high. Therefore, one should definitely try printing the rollers in PLA and then directly covering them with heat shrink tubing....
The forklift works great with Mecanum wheels because it can drive left and right without turning. However, the effort is not insignificant. A single wheel consists of 34 individual parts instead of a single part (+tire) in the other versions. The other two versions also run very nicely. I have now built 2 sets of Mecanum wheels: this requires great precision and is not for those with poor fine motor skills
License
This user content is licensed under a
Creative Commons Attribution-Noncommercial
Comment & Rating (8)