Customisable underwater robot - submarin drone












Print Profile(2)


Description
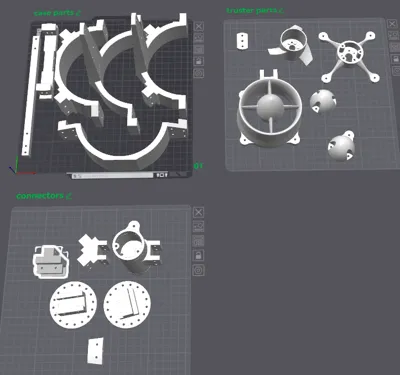
The models provided here allows for multiple propeller and ballast configurations.
They are compatible with the 4" watertight enclosure sold by BlueRobotics.
Thrusters
Thrusters (inspired on BlueRobotics thrusters) are compatible with Turnigy Aerodrive DST brushless motors (tested DST-700 and DST-1200, so far). Please note that the models provided here are not compatible with the M100 and M200 motors sold by BlueRobotics.
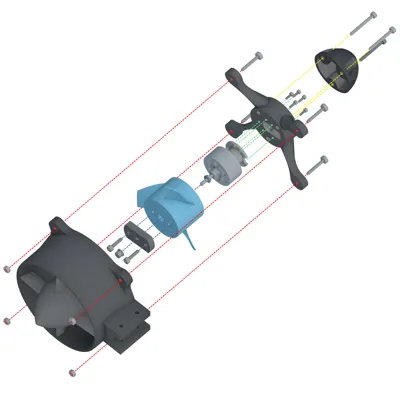
The following figures illustrate a mounted propeller and an exploded version showing its components.


The objects are named in the Models folder as follows. Starting from the bottom left object (not considering nuts and bolts):
- thruster_main (.igs, .stp, .stl)
- propeller_dst_2_bluerov_adapter (.igs, .stp, .stl)
- propeller (.igs, .stp, .stl): the propeller is a modification of the original T200 propeller developed by BlueRobotics, which can be ordered from Bluerobotics' store. The version provided here fits better with Turnigy DST motors.
- motor: the figure illustrate a Turnigy DST-700. Model is not provided here
- thruster_motor_mount (.igs, .stp, .stl): the motor is mounted onto this X shaped component. The thruster_motor_mount is then mounted onto the thurster_main component. This mount has holes aligned with those of DST motors bases. It has not been tested yet with Bluerobotics M100 or M200 motors, so it may be not compatible.
- thruster_cap.stl (.igs, .stp, .stl)
Clamps and posterior support
Two sets of clamps have been designed that allow easy customisation of thrusters and ballast configurations.

The model files are named as follows
- clamp_anterior_superior (.igs, .stp, .stl): the upper part of the anterior clamp. It has two mounting points (left and right) for motors, ballasts or adapters.
- clamp_anterior_inferior (.igs, .stp, .stl): the lower part of the anterior clamp. It has two mounting points (+45 degrees, -45 degrees) for motors, ballasts or adapters.
- stick (.igs, .stp, .stl): this stick can be screwed to both the posterior and anterior lower clamps.
- clamp_posterior_superior (.igs, .stp, .stl): the upper part of the posterior clamp. It has two mounting points (left and right) for motors, ballasts or adapters. It has an additional structure for mounting the support for rear motors or ballasts.
- clamp_posterior_inferior (.igs, .stp, .stl): the lower part of the posterior clamp. It has two mounting points (+45 degrees, -45 degrees) for motors, ballasts or adapters. It has an additional structure for mounting the support for rear motors or ballasts.
- rear_clamp_connector (.igs, .stp, .stl): it connects the two posterios clamps and provides an additional mounting point for a motor, ballast or adapter.
- posterior_clamp_2_tube_connector (.igs, .stp, .stl): this small elements allows to screw the posterior clamps (the same can be used for both the upper and lower parts) into the cap of the Bluerobotics watertight enclosure.
Mounting points
Clamps and rear connector have several mounting points for motors, ballasts and adapters.
For instance, a motor can be plugged onto a mounting point of the anterior clamp as in the following illustration:

We designed three adapters to allow rotating the original mounting point.

- adapter_90 (.igs, .stp, .stl): allows rotating the original mounting point of 90 degrees. It can be used, for instance, to mount a vertical thruster, as in the following illustration:

- adapter_round[_male, _female] (.igs, .stp, .stl): allows 5 different rotation angles within 90 degrees. It can be used, for instance, to mount a diagonal thruster, as in the following illustration:

- adapter_split (.igs, .stp, .stl): splits a mounting point into two, rotated at +45 and -45 degrees in respect to the original mounting point orientation. A combination of this and the previous adapters allows for a great number of possible thruster configurations, as in the example illustrated in the following figure.
------
Source:
https://github.com/guidoschillaci/underwater-drone
Schillaci, G., Schillaci, F. and Hafner, V.V. A Customisable Underwater Robot, arXiv preprint arXiv:1707.06564. 2017.
Link to the paper: https://arxiv.org/abs/1707.06564
Comment & Rating (57)