TaubenTurret - Automated pigeon deterrent





















Print Profile(1)

Description
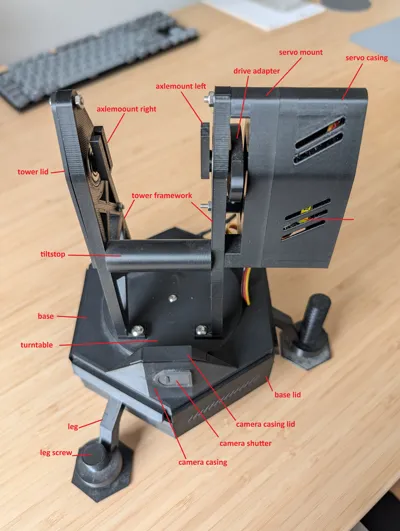
TaubenTurret: an automated, computer vision-driven water turret designed to humanely defend your balcony or patio from pigeons!
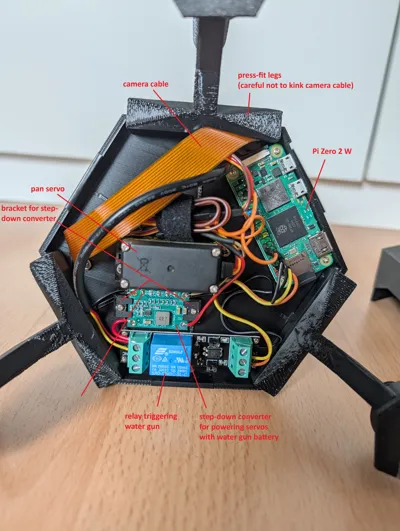
Powered by a Raspberry Pi Zero 2 W, a Raspberry Pi Camera module v2, and an Ultralytics YOLO-based backend, this system actively scans its environment to detect and deter unwanted visitors.

How It Works
The system continuously monitors the live video stream on the Raspberry Pi. If it detects motion, it immediately sends an image to the external target detection backend. If the backend confirms the presence of a bird, the turret calculates the real-world 3D angles from the 2D pixel coordinates, aims the water gun, and fires a short burst of water.
With a good Wi-Fi connection to your backend server, it can reach response times of about 500ms.
Software Features
- Target Detection: Combines lightweight on-device motion detection with a external object detection backend for accurate and fast target detection.
- Built-in Web Dashboard: Features a web interface where you can view a live camera stream, review recorded video clips of motion events, and even aim and fire the turret manually.
Auto-Recording: Automatically saves video clips whenever motion is detected.
Printing Recommendations
I highly recommend printing these parts in ASA if the turret is exposed to direct sunlight. I initially tried PLA and PETG but experienced warping over time. ASA provides the necessary UV and heat resistance.
I designed the turret to be powered by a 5V powerbank and the watergun's internal baterry. Depending on the capacity, they both need to be recharged every 2-3 days. If you have an outlet nearby, I would recommend powering all components with a suitable power supply.
Disclaimer: These models were originally designed for my older printer, which wasn't perfectly calibrated. I haven't printed this exact version on my Bambu Lab printer yet, so I cannot guarantee that the provided models and print profiles will have good tolerances out of the box for you. You might need to do some minor sanding or scale adjustments depending on your machine. Improved print profiles are welcome.
Update 2026-06-08: I uploaded the .f3d files so you can easily make adjustments. Please note I am a CAD beginner, so the files might not be perfectly structured.
Required Hardware
- Raspberry Pi Zero 2 W (or newer/faster Pi).
- Raspberry Pi camera module v2 (or newer, must support picamera2).
- 2x PWM servos ~15kg/cm (for pan and tilt control): https://www.amazon.de/dp/B09KZ8VTNB
- Battery-powered water gun (commonly found on AliExpress or Amazon): https://de.aliexpress.com/item/1005005725759308.html
- Relay module (for triggering the water gun electronically via GPIO): https://www.amazon.de/dp/B0CN1C1S7Y
- Step-down converter (if you want to power the 5 V servos directly from the water gun's 7.4 V battery): https://www.amazon.de/dp/B0C2H74RQ3
- 2 Ball bearings 8x22x7mm.
- Various wires, screws and nuts for assembly.
- (Optional) A USB 5GHz Wi-Fi adapter to improve network connectivity and reduce response latency. Make sure to check compatibility with the Raspberry Pi before purchasing.
Required Software
You will need to set up both the turret control software on the Raspberry Pi and the AI detection backend on a separate computer/server on your network.
- Control Software (Raspberry Pi): taubenturret GitHub Repository
- Target Detection Backend (Server): taubenturret-backend GitHub Repository
Comment & Rating (37)