Search models, users, collections, and posts
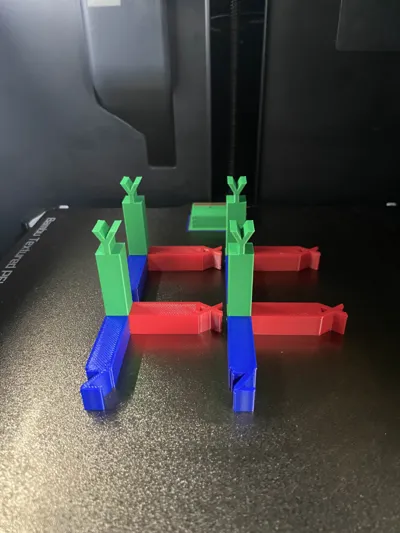
XYZ Cartesian Coordinate Frame
IP Report












Print Profile(3)

One Colour
Designer
59 min
1 plate

RGB XYZ
Designer
4.3 h
1 plate

Multicoloured Letters
Designer
2.9 h
1 plate
Open in Bambu Studio
Boost
38
75
15
8
183
121
Released
Description
In robot dynamics and trigonometry I was required to assign frames to the joints of a robot, usually, you're supposed to use the right hand rule, however, I decided to be a little extra 🤪
You can either print in multicolour filament, or just print in white filament and colour in XYZ with a sharpie like I did 😎
License
This user content is licensed under a Standard Digital File License.
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (15)